Check out our White Paper Series!
A complete library of helpful advice and survival guides for every aspect of system monitoring and control.
1-800-693-0351
Have a specific question? Ask our team of expert engineers and get a specific answer!
Sign up for the next DPS Factory Training!

Whether you're new to our equipment or you've used it for years, DPS factory training is the best way to get more from your monitoring.
Reserve Your Seat Today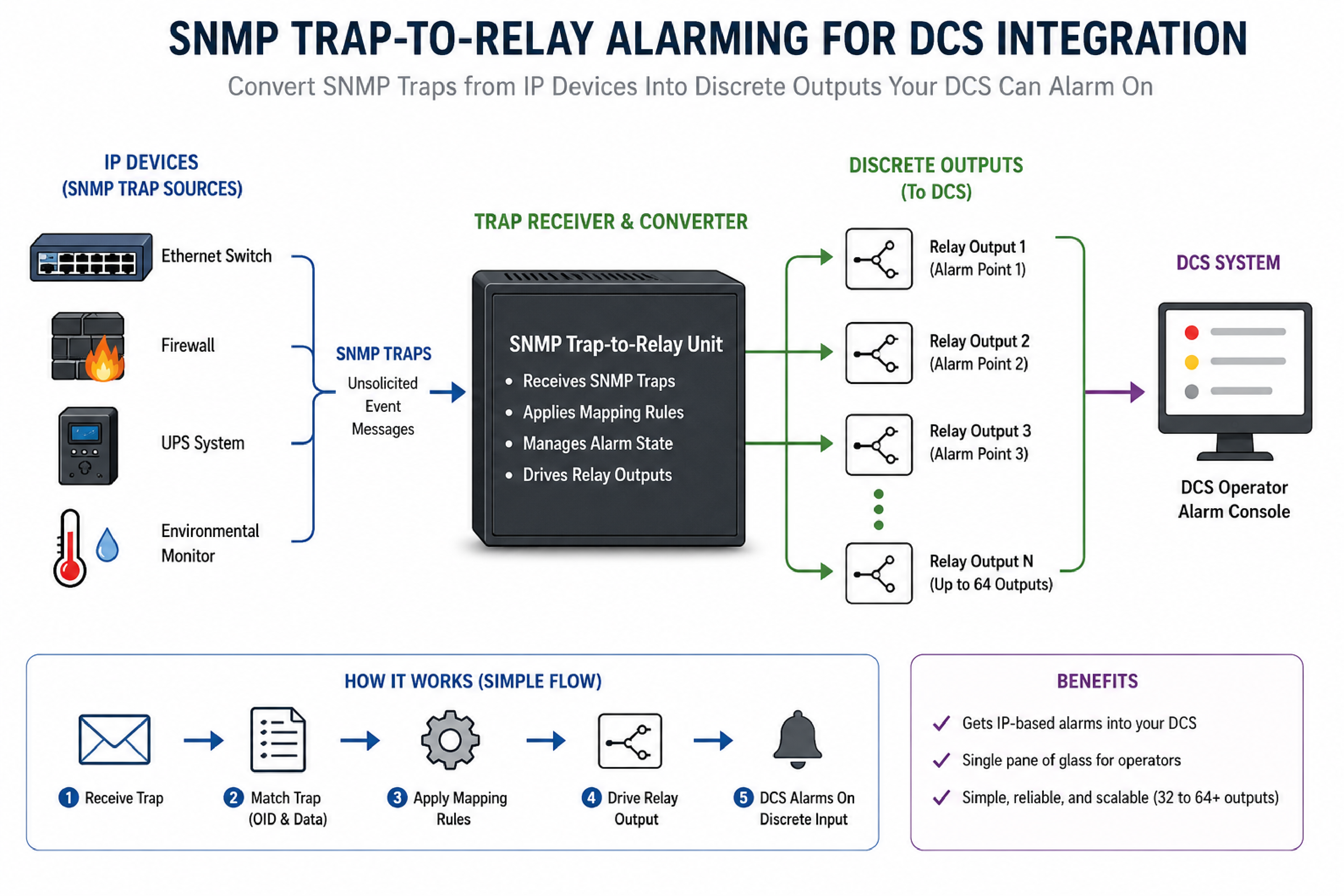
When monitoring infrastructure remotely, SNMP trap-to-relay alarming refers to receiving SNMP traps from networked equipment and translating those events into discrete hardware outputs (relay or open-collector) so a DCS or PLC can alarm on them like any other hardwired point.
This approach is common in industrial and critical facilities where the Distributed Control System (DCS) is the authoritative alarm console, but many modern subsystems (telecom, Ethernet switches, firewalls, UPS, rectifiers, environmental monitors) report alarms over SNMP rather than dry contacts.
SNMP trap-to-relay conversion solves the problem of getting IP-based alarms into a DCS that primarily accepts discrete inputs. A DCS is often designed around deterministic I/O and controlled change management, while many OT-adjacent subsystems are managed like IT devices and send alarms as asynchronous SNMP traps.
When those worlds do not connect cleanly, operations teams can end up with two alarm domains: the DCS for process alarms and a separate NMS for infrastructure alarms. Split alarm visibility can delay response during power, cooling, comms, and security events that directly impact process uptime.
An SNMP trap is an unsolicited message sent by a device to an SNMP manager to report an event. SNMP polling is the opposite pattern: a manager queries device variables (OIDs) at an interval and infers alarm states from the responses.
Traps are attractive for alarm extension because they can report changes immediately and reduce routine network traffic. Traps also introduce design requirements that are easy to underestimate, such as ensuring the trap receiver is reachable, confirming community strings or SNMPv3 credentials, handling packet loss, and mapping vendor-specific OIDs into actionable alarm points.
Converting SNMP traps into discrete outputs means implementing a rules engine that listens for traps, matches the received OID and values to a defined alarm condition, and then drives a physical output to the correct state. The output can be a relay contact closure, a transistor output, or another hardware form that the DCS can accept as a discrete input.
The key engineering step is defining how an event (trap) becomes a state (output). A DCS input point typically represents a state that remains asserted until cleared. Many traps are one-shot notifications, so the trap-to-output device must apply latching behavior, timers, acknowledgements, or reset logic to fit the DCS alarm philosophy.
Extending SNMP alarms into a DCS can be implemented with dedicated trap-relay hardware, an RTU that supports trap reception plus outputs, a centralized alarm master with protocol mediation, or a software gateway combined with remote I/O.
The correct choice depends on the number of alarm points, how many source devices are involved, the DCS input capacity, cybersecurity constraints, and whether the project must scale to many remote locations.
| Approach | Best Fit | Strengths | Tradeoffs To Plan For |
|---|---|---|---|
| Dedicated SNMP trap-to-relay unit (32/64 output class) | Single site needing a defined number of discrete outputs mapped from traps | Simple interface to DCS; clear hardware I/O model | Mapping maintenance can be device-specific; may need additional logging, redundancy, and state handling |
| RTU with SNMP trap reception and onboard outputs | Remote sites requiring both SNMP integration and traditional telemetry | Consolidates monitoring, outputs, and local alarming; easier growth beyond just traps | Needs careful point design so traps become stateful DCS points |
| Central alarm master with protocol mediation (NOC-centric) | Enterprises standardizing alarms across many systems and sites | Normalization, correlation, escalation; unified audit trail | Still needs a path from the alarm master to the DCS (discrete I/O, Modbus, OPC, etc.) |
| Software SNMP trap receiver + remote I/O | Facilities with strong OT/IT integration and established virtualization | Flexible logic; easier integrations to IT tools | Must engineer deterministic behavior, watchdogs, and fail-safe outputs suitable for OT environments |
In DCS alarm extension projects, output count is a practical proxy for how granular the alarm mapping needs to be. A 32-output design can work when alarms are grouped into a small number of categories (for example, major/minor, or per subsystem). A 64-output design is more common when the DCS needs distinct points per device, per alarm type, or per remote skid.
Output sizing should be driven by alarm philosophy, not just by the number of traps available. Many vendor devices can send dozens of unique traps, but a DCS may not need one-to-one mapping for every informational event.
Good SNMP trap mapping is defined as a deterministic, documented translation between vendor events and operational alarm points, including clear semantics for assert and clear behavior. In practice, success depends on disciplined normalization: standard naming, severity conventions, and consistent rules for latching and clearing.
Good normalization is also defined by reproducibility. Another engineer should be able to replace a device, re-point traps, and restore the same alarm behavior using the documentation and configuration backup.
SNMP trap to DCS integrations fail when event messages are treated like hardwired states without engineering the missing parts: state persistence, loss detection, and consistent mapping. Traps are lightweight and flexible, but they push design responsibility into the receiver.
An RTU (Remote Telemetry Unit) is defined as a field device that aggregates inputs, controls outputs, and communicates status back to a central system. In many critical infrastructure sites, an RTU is also a practical boundary between IP-based monitoring and deterministic control systems.
For projects that need SNMP traps to drive outputs, an RTU can combine multiple roles: receiving traps, presenting discrete outputs to the DCS, monitoring local hardwired alarms, and providing local annunciation or escalation.
DPS Telecom manufactures NetGuardian RTUs, including models that can receive and act on SNMP traps. In a typical design, the RTU receives traps from IP devices and uses configurable rules to drive relay outputs or other control points that the DCS can read. This can reduce the number of standalone protocol converters and keep remote-site monitoring consistent across facilities.
An alarm master is defined as a centralized system that collects alarms from many sources, normalizes them, and drives notification and escalation workflows. In NOC workflows, an alarm master reduces monitoring tool sprawl by providing one place to see and manage alarms.
If a project spans multiple sites or multiple subsystems, per-site trap relays can create inconsistent alarm semantics and duplicated configuration effort. A centralized alarm master can standardize naming, severity, maintenance windows, and reporting across the environment.
DPS Telecom manufactures T/Mon alarm master products. In a common architecture, a T/Mon system ingests alarms via SNMP traps and other protocols, normalizes them, and then forwards alarms to downstream systems using the interfaces required by operations. Where a DCS requires discrete points, the alarm master approach is often paired with an I/O layer at the facility boundary.
Protocol mediation is defined as translating between many vendor protocols and a small number of standardized interfaces used by operations. In mixed OT and telecom environments, protocol mediation is the practical method for absorbing vendor uniqueness (different MIBs, different trap structures, different severity models) without forcing the DCS or the NOC platform to implement bespoke drivers for each subsystem.
Good protocol mediation reduces the number of direct integrations into the DCS. Instead of integrating the DCS with each device type, the DCS integrates with a curated set of alarm points that have already been normalized.
Cybersecurity and reliability controls for SNMP trap alarm paths are defined as the safeguards that keep alarm transport dependable and aligned with OT security requirements. Since traps are network packets, the trap receiver becomes part of the security boundary.
Reliability also includes electrical design. If the DCS expects fail-safe behavior, outputs should be engineered so loss of power or loss of receiver function transitions to the correct alarm state, consistent with the facility safety case.
A trap-to-output project is successful when the alarm definition work is completed before commissioning. Hardware is the easy part. Alarm semantics, mapping, and acceptance testing are what prevent late surprises.
Yes, but only if the receiver converts the event into a state. That typically means latching the output until a clear condition occurs, such as a clear trap, a timer expiration, or a manual reset input.
You need enough outputs to represent the DCS point list. If operators need distinct alarms per subsystem or per device, 64 outputs is often more comfortable. If alarms can be grouped by action, 32 outputs can be sufficient.
A well-designed system includes watchdog logic that alarms on loss of trap reception. That can be implemented as heartbeat traps, periodic polling as a backup, or receiver self-monitoring mapped into a separate DCS point.
Not always, but SNMPv3 is preferred when security policy requires authentication and encryption. Many facilities still use SNMPv2c in segmented management networks with strict ACLs. The decision should follow the site cybersecurity standard.
Usually not. Most DCS platforms are not designed to be a general-purpose SNMP trap receiver and normalizer. A dedicated integration layer (trap receiver, RTU, or alarm master) simplifies mapping, logging, and operational ownership.
DPS Telecom solutions are commonly used as the alarm integration layer. Depending on the architecture, a NetGuardian RTU that can receive SNMP traps and drive outputs can provide the field interface, and a T/Mon alarm master can provide centralized normalization and escalation.
If a facility needs SNMP traps converted into discrete outputs to extend alarms into a DCS, the engineering details around mapping, state handling, and fail-safe behavior determine whether the integration is reliable. DPS Telecom can help define the alarm point list, select the right integration architecture, and standardize how SNMP alarms are normalized across sites.

Andrew Erickson
Andrew Erickson is an Application Engineer at DPS Telecom, a manufacturer of semi-custom remote alarm monitoring systems based in Fresno, California. Andrew brings more than 19 years of experience building site monitoring solutions, developing intuitive user interfaces and documentation, and opt...